( المحاضرة الثانيه )
الاتصال و التحكم
يمكن ان تكون اجهزة الاتصال و التحكم داخل الانساله في غاية التعقيذ , لهذا السبب اصبح لها
علم مستقل لدراستها يسمى [ ع(580161ر© ] , فجميع الاجهزه التي تعمل بالتحكم عن بعد و
العكسيه ( الراجعه ) , ولذلك لتحقيق التحكم الذاتي ( ردة الفعل )
1. القذائف الموجهه على اهداف معينه ( تحتوي على اجهزة حسيه )
3. مثبت آلي للحرارة ( ثرموستات )
> العقل الالكتروني للانساله ؛
يعتبر عقل الانساله الوحده المسيره له و التي تقوم بتنفيذ او حساب الخوارزميات المختلفه و التي
برمجة العديد من الوظائف حيث ترتب بشكل طبقات و تحتوي كل طبقه على مجموقه من
لظ جتحي :0 رح عار
عباره عن شبكه مترابطه من عقد تعمل باسلوب يشبه الشبكه العصبونيه للدماغ البشري
محمد يحيى محمد الصيلمي عا 5-145 117 كع
مقدمة عن الإنسان الآلي


الوصف
مقدمة عن الإنسان الآلي
© الاجهزه و البرامج الجاهزة ( المساعدة ) ؛
التعليمات و البيانات التي يتم ادخالها اليها ( الاجهزة ) يطلق عليها بلبرامج الجاهزة
( 5000028 ) ؛ تحتوي الانساله على جزء فقط من مجموع الاجهزه التي تكون وحدة
كمبيوتر كامله
فمثلا : عند كتابة اي برنامج معين فان في البدايه يتم التصميم و التحليل ( ماذا نريد
من النظام ؟)
اما بالنسبه للانساله يوجد القليل من الضوابط لتصميم البرمجيات و عتاد الحاسوب
مثال : الحواجز و العوائق ؛ في هذه الحاله يتم تصميم برنامج ليتعامل مع ليزر لقياس
المسافه و في حالة وصوله الى العائق يقوم بالدوران
1. إنسالة الابحاث :
و تنقسم بحد ذاتها الى أقسام أخرق : -
الفكرة في ذلك صناعة روبوتات ذات احجام صغيرة جداً قد تصل الى " 10 مترو
هي تلك الروبوتات ذا البنية السيلوكونيه و المشغلات المكانيكة المرنه ( إما
عضلات هوائيه او سوائل حديدية ؛ مثل الزثبق ) و التي يمكن التحكم بها
باستخدام الشبكات العصبونيه
ج. روبوتات اعادة التشكل الذاتي :
و هي تلك الانسالات القادرة على تغير شكلها ( بنفسها ) كي تتلائم مع مهمه
محمد يحيى محمد الصيلمي جا 5-315 117 زع
التعليمات و البيانات التي يتم ادخالها اليها ( الاجهزة ) يطلق عليها بلبرامج الجاهزة
( 5000028 ) ؛ تحتوي الانساله على جزء فقط من مجموع الاجهزه التي تكون وحدة
كمبيوتر كامله
فمثلا : عند كتابة اي برنامج معين فان في البدايه يتم التصميم و التحليل ( ماذا نريد
من النظام ؟)
اما بالنسبه للانساله يوجد القليل من الضوابط لتصميم البرمجيات و عتاد الحاسوب
مثال : الحواجز و العوائق ؛ في هذه الحاله يتم تصميم برنامج ليتعامل مع ليزر لقياس
المسافه و في حالة وصوله الى العائق يقوم بالدوران
1. إنسالة الابحاث :
و تنقسم بحد ذاتها الى أقسام أخرق : -
الفكرة في ذلك صناعة روبوتات ذات احجام صغيرة جداً قد تصل الى " 10 مترو
هي تلك الروبوتات ذا البنية السيلوكونيه و المشغلات المكانيكة المرنه ( إما
عضلات هوائيه او سوائل حديدية ؛ مثل الزثبق ) و التي يمكن التحكم بها
باستخدام الشبكات العصبونيه
ج. روبوتات اعادة التشكل الذاتي :
و هي تلك الانسالات القادرة على تغير شكلها ( بنفسها ) كي تتلائم مع مهمه
محمد يحيى محمد الصيلمي جا 5-315 117 زع
د. روبوتات الاسراب ( الطوابيد ) :
وهي عبارة عن الاف من الروبوتات الصغيرة التي صممت لتشبه في ادائها اسراب
النمل و النحل و التي تتعاون مع بعضها البعض لتؤدي مهمة معينه
2. الانسالات الاهداف العامه المستقله :
هي رويوتات قادره على القيام بعدد من الاعمال بمفردها فهي تستطيع ان تتحرك
تلقائيا في المناطق المعروقه لديها دون ارشاد من احد ؛ فمثلاً تتفاعل مع الابواب
الالكترونيه و المصاعد و جهاز الانذار ( روبوتات تستجيب للانذارات ) او روبونات تتعرف
على الاأشخاص و روبوتات تراقب الحاله المناخيه
3. الانسالات المكرّسه :
و التي تقوم بعبئ كبير و هي تلك الروبونات ذات الدقه الاكبر ( التحمل و ذات الانتاجيه
الاكبر و التي لها القدرة على القيام بالعديد من المهام في آن واحد ( المهام الثقيله) و
الاعمال الشاقه ) وتنقسم الى نوعين
مثال
» الروبوتات التي تستخدم في تركيب و صناعة السيارات (صانعات الالكترونيات )
* روبوتات ذات الاعمال الخطيرة
- الروبوتات المستخدمه في المصانع الانتاج النووي
- الروبونات المستخدمه في استكشاف الالغام
- الروبوتات الخاصه بالبراكين و الزلازل
٠ الاعمال القذرة
- المنازل و المجاري
- نقل الفضلات
وهي تصنف تحت لرويوتات ذات التحكم عن بعد
© التصنيف العام لانظمة الروبوت :-
٠ تصنف الى ثلاثة اقسام
وهي عبارة عن كتل متحركه ضمن نظام آلي و يختلف من انساله الى اخرى
حسب الوظيفه التي صمم من اجلها ؛ بالاضافه الى برنامج حركة المسار »
مثل : الروبوتات المستخدمه في الانتاج الزراعي و البحث عن النقط
وهي تلك الروبوتات التي تستخدم في طلب و نقل المعلومات على شكل
و تتقسم الى عدة تصنيفات :-
محمد يحيى محمد الصيلمي جا 5-315 117 زع
وهي عبارة عن الاف من الروبوتات الصغيرة التي صممت لتشبه في ادائها اسراب
النمل و النحل و التي تتعاون مع بعضها البعض لتؤدي مهمة معينه
2. الانسالات الاهداف العامه المستقله :
هي رويوتات قادره على القيام بعدد من الاعمال بمفردها فهي تستطيع ان تتحرك
تلقائيا في المناطق المعروقه لديها دون ارشاد من احد ؛ فمثلاً تتفاعل مع الابواب
الالكترونيه و المصاعد و جهاز الانذار ( روبوتات تستجيب للانذارات ) او روبونات تتعرف
على الاأشخاص و روبوتات تراقب الحاله المناخيه
3. الانسالات المكرّسه :
و التي تقوم بعبئ كبير و هي تلك الروبونات ذات الدقه الاكبر ( التحمل و ذات الانتاجيه
الاكبر و التي لها القدرة على القيام بالعديد من المهام في آن واحد ( المهام الثقيله) و
الاعمال الشاقه ) وتنقسم الى نوعين
مثال
» الروبوتات التي تستخدم في تركيب و صناعة السيارات (صانعات الالكترونيات )
* روبوتات ذات الاعمال الخطيرة
- الروبوتات المستخدمه في المصانع الانتاج النووي
- الروبونات المستخدمه في استكشاف الالغام
- الروبوتات الخاصه بالبراكين و الزلازل
٠ الاعمال القذرة
- المنازل و المجاري
- نقل الفضلات
وهي تصنف تحت لرويوتات ذات التحكم عن بعد
© التصنيف العام لانظمة الروبوت :-
٠ تصنف الى ثلاثة اقسام
وهي عبارة عن كتل متحركه ضمن نظام آلي و يختلف من انساله الى اخرى
حسب الوظيفه التي صمم من اجلها ؛ بالاضافه الى برنامج حركة المسار »
مثل : الروبوتات المستخدمه في الانتاج الزراعي و البحث عن النقط
وهي تلك الروبوتات التي تستخدم في طلب و نقل المعلومات على شكل
و تتقسم الى عدة تصنيفات :-
محمد يحيى محمد الصيلمي جا 5-315 117 زع
( المحاضرة الثالثه )
يتبع المحاضرة السابقة
أ- اجهزة الروبوتات المعالجة الاليه ؛
1- روبوتات ذات برامج ثابتة
وهي تتبر روبوتات بدائيه لانها لا تمتلك نظام تحكم مبرمج و انما تقوم بنفس المهمة
2- روبوتات قابله للبرمجة ؛
جيل الروبوتات الول ؛ و هي تمتلك قيادة تتحكم في جميع الوصلات و نظام التحكم
التابع لها يتكيف بسهوله مع عمليات يدويه متنوعه ؛ مثل : روبوت اللحام و آلات الصب +
و كما توجد صعوبه في نقل العمليات الى عمليات جديدة و انما فقط يتم تطويرها في
نفس المهمه
3- روبونات التكيفية :
روبوتات الجيل الثاني و هي روبوتات تكيف نفسها باستقلالية الى درجة اعلى او ادنى
الموقف أو الظروف الخارجيه ) ؛ مثل : مستشعر الجرارة ؛ و مستشعر الرطويه
و كما يوجد لها نظام معالجه معلومات متطورة هدفه توليد اشارات تحكم ملائمه
4 الروبوتات الذكية .
الجيل الثالث ؛ و تمتلك حساسات متنوعه ؛ مع حاسوب دقيق و متطور لمعالجة
المعلومات , و يختلف عن باقي الانواع في انها تحتوي على عناصر الذكاء الصناعي
( اي ان بمقدورها تحليل المهام و صنع القرار حسب الخوارزميات المعطاة لهاو بدون
تدخل الائسات )
> المخطط العام للروبوتات الآلية
ا اليد الآليه | 65 - نظام الاخراج | 65 - نظام الحاسوب | 15 - نظام النقل
60 < لوحة اوامر التحكم | 76 < البيعة التكنولوجيه | 00 المشغل |
5 - عناصر حساسه | 5 2 نظام الاستجابة العكسية
محمد يحيى محمد الصيلمي جا 5-147 117 زع
يتبع المحاضرة السابقة
أ- اجهزة الروبوتات المعالجة الاليه ؛
1- روبوتات ذات برامج ثابتة
وهي تتبر روبوتات بدائيه لانها لا تمتلك نظام تحكم مبرمج و انما تقوم بنفس المهمة
2- روبوتات قابله للبرمجة ؛
جيل الروبوتات الول ؛ و هي تمتلك قيادة تتحكم في جميع الوصلات و نظام التحكم
التابع لها يتكيف بسهوله مع عمليات يدويه متنوعه ؛ مثل : روبوت اللحام و آلات الصب +
و كما توجد صعوبه في نقل العمليات الى عمليات جديدة و انما فقط يتم تطويرها في
نفس المهمه
3- روبونات التكيفية :
روبوتات الجيل الثاني و هي روبوتات تكيف نفسها باستقلالية الى درجة اعلى او ادنى
الموقف أو الظروف الخارجيه ) ؛ مثل : مستشعر الجرارة ؛ و مستشعر الرطويه
و كما يوجد لها نظام معالجه معلومات متطورة هدفه توليد اشارات تحكم ملائمه
4 الروبوتات الذكية .
الجيل الثالث ؛ و تمتلك حساسات متنوعه ؛ مع حاسوب دقيق و متطور لمعالجة
المعلومات , و يختلف عن باقي الانواع في انها تحتوي على عناصر الذكاء الصناعي
( اي ان بمقدورها تحليل المهام و صنع القرار حسب الخوارزميات المعطاة لهاو بدون
تدخل الائسات )
> المخطط العام للروبوتات الآلية
ا اليد الآليه | 65 - نظام الاخراج | 65 - نظام الحاسوب | 15 - نظام النقل
60 < لوحة اوامر التحكم | 76 < البيعة التكنولوجيه | 00 المشغل |
5 - عناصر حساسه | 5 2 نظام الاستجابة العكسية
محمد يحيى محمد الصيلمي جا 5-147 117 زع
في المخطط الروبوتات من الجيل الثاني و الثالث تستخدم الحساسات وهو ما يقصد به
المستشعرات ؛ وتتزود روبوتات الجيل الثاني بحساسات اللمس و ايضاً حساسات
تحديد المواقع ؛ اما روبوتات الجيل الثالث فتضاف اليها ميزة آخرى وهي وجود نظام
الذكاء الاصطناعي لها
ب- الرويوتات ذات التحكم عن بعد ؛
1- معالجات التحكم المباشر
وهي تحتوي على عامل تشغيل بشري ؛ يتحكم عن بعد بكل مفصل للمعالج وذلك
من خلال لوحة المفاتيح او عضا القيادة و هي تعتبر قياده كهربائيه ( اي انتقال
الاشارة الكهربائيه )
يتحكم بها العامل البشري عن بعد - بمسافه امنه - يعني دائماً تكون في مناطق
خطره ؛ و تتحكم بحركة كل مفصل و تنتقل الى المفاصل الأخرى و هذا هو الفرق
بينها و بين الأول ؛ و تتواجد عادةٌ ضمن البيقه النوويه
3- روبوتات التحكم الاأشرافي
توافق البرامج لعمل الروبوتات
4- روبوتات التحكم الجواري
© الفرق بينه و بين النوع السابق ؟
في انها لا تتلقى الاوامر فحسب بل تقول بإدراك الحاله و صنع القرار ( اي انها
تحتوي على لذكاء الصناعي )
و يتم التحكم بها عن طريق لوحة المفاتيح المسيطرة بها عن طريق الانسان سواء
ت- روبوتات التحكم اليدوي :
وهي روبوتات التحميل و التفريغ و العمل الشاق
1- المعالج المفصل المتوازن
عبارة عن اليه باجزاء متعددة مُقاده بواسطة مفاصل و التي تكون في حالة توازن
محمد يحيى محمد الصيلمي جا 5-145 117 زع
المستشعرات ؛ وتتزود روبوتات الجيل الثاني بحساسات اللمس و ايضاً حساسات
تحديد المواقع ؛ اما روبوتات الجيل الثالث فتضاف اليها ميزة آخرى وهي وجود نظام
الذكاء الاصطناعي لها
ب- الرويوتات ذات التحكم عن بعد ؛
1- معالجات التحكم المباشر
وهي تحتوي على عامل تشغيل بشري ؛ يتحكم عن بعد بكل مفصل للمعالج وذلك
من خلال لوحة المفاتيح او عضا القيادة و هي تعتبر قياده كهربائيه ( اي انتقال
الاشارة الكهربائيه )
يتحكم بها العامل البشري عن بعد - بمسافه امنه - يعني دائماً تكون في مناطق
خطره ؛ و تتحكم بحركة كل مفصل و تنتقل الى المفاصل الأخرى و هذا هو الفرق
بينها و بين الأول ؛ و تتواجد عادةٌ ضمن البيقه النوويه
3- روبوتات التحكم الاأشرافي
توافق البرامج لعمل الروبوتات
4- روبوتات التحكم الجواري
© الفرق بينه و بين النوع السابق ؟
في انها لا تتلقى الاوامر فحسب بل تقول بإدراك الحاله و صنع القرار ( اي انها
تحتوي على لذكاء الصناعي )
و يتم التحكم بها عن طريق لوحة المفاتيح المسيطرة بها عن طريق الانسان سواء
ت- روبوتات التحكم اليدوي :
وهي روبوتات التحميل و التفريغ و العمل الشاق
1- المعالج المفصل المتوازن
عبارة عن اليه باجزاء متعددة مُقاده بواسطة مفاصل و التي تكون في حالة توازن
محمد يحيى محمد الصيلمي جا 5-145 117 زع
2- الذراع الآلي الهيكلي
هي عباره عن روبوتات متعدده الاجزاء متصله مع اجزاء الذراع البشري او الساق
البشري
مثال: الجهاز المستخدم مع المكاسيج ( المعاقين الذي ليس لديهم ارجل او ايدي)
من جهة
يمكن ان يكون البعض منها باطوال مختلفه و بدرجات متحكم بها من الحريه و التي
يطلق عليها ( درجة الحريه - 0860007 كه 28986 ) فكلما زات عدد المفاصل في
العضو في الاله فإنها تزيد من درجة التحكم بها
> تقسم الاليات الفعاله وفقاً لعدد السلاسل الحركيه
يعني ان العضو الاخير يدخل في زوج حركي واحد فقط
الزوج الحركي : ويعني بذلك وجود عضوين متصلين بمفصل و في هذا النوع يكون احد
العضوين متصل بعضو واحد فقط و العضو الاخر متصل بعضوين او يكون مثبت
مقصل : و يمتل
زوج حركي مغلق
مفصل : ويمثل 7777
زوج حركي مفتوح
محمد يحيى محمد الصيلمي جا 5-315 117 زع
هي عباره عن روبوتات متعدده الاجزاء متصله مع اجزاء الذراع البشري او الساق
البشري
مثال: الجهاز المستخدم مع المكاسيج ( المعاقين الذي ليس لديهم ارجل او ايدي)
من جهة
يمكن ان يكون البعض منها باطوال مختلفه و بدرجات متحكم بها من الحريه و التي
يطلق عليها ( درجة الحريه - 0860007 كه 28986 ) فكلما زات عدد المفاصل في
العضو في الاله فإنها تزيد من درجة التحكم بها
> تقسم الاليات الفعاله وفقاً لعدد السلاسل الحركيه
يعني ان العضو الاخير يدخل في زوج حركي واحد فقط
الزوج الحركي : ويعني بذلك وجود عضوين متصلين بمفصل و في هذا النوع يكون احد
العضوين متصل بعضو واحد فقط و العضو الاخر متصل بعضوين او يكون مثبت
مقصل : و يمتل
زوج حركي مغلق
مفصل : ويمثل 7777
زوج حركي مفتوح
محمد يحيى محمد الصيلمي جا 5-315 117 زع
2. السلاسل الحركيه المعقدة
و تتضمن عدد من السلاسل البسيطه
كما تلاحظ باتها سلسله معفقدة
و تدخل اعضاء الروبوت المستقله في ثلائه او اكثر من الازواج الحركيه
و تتقسم الى قسمين
أ. سلاسل متقرعه : و هي تتضمن سلاسل بسيطه مقتوحه
ب. سلاسل المجمعه : و هي تتضمن كلا النوعين سواء مفتوحه ام مغلقه و
نوعين
2. متصله ( مغلقة ) : و هي لمتصله بعضوين ؛ او قد يكون مثبت على قاعدة من
محمد يحيى محمد الصيلمي جا 5-317 117 زع
و تتضمن عدد من السلاسل البسيطه
كما تلاحظ باتها سلسله معفقدة
و تدخل اعضاء الروبوت المستقله في ثلائه او اكثر من الازواج الحركيه
و تتقسم الى قسمين
أ. سلاسل متقرعه : و هي تتضمن سلاسل بسيطه مقتوحه
ب. سلاسل المجمعه : و هي تتضمن كلا النوعين سواء مفتوحه ام مغلقه و
نوعين
2. متصله ( مغلقة ) : و هي لمتصله بعضوين ؛ او قد يكون مثبت على قاعدة من
محمد يحيى محمد الصيلمي جا 5-317 117 زع
© انواع الازواج الحركيه ( حركة المفاصل )
1. مفصل انسحابي
عندما كوت المفصل بالوضع العادي
2. مفصل دوراني
الحل : يوجد سته مفاصل ( ازواج حركيه )
محمد يحيى محمد الصيلمي جا 1123-1475 زو
1. مفصل انسحابي
عندما كوت المفصل بالوضع العادي
2. مفصل دوراني
الحل : يوجد سته مفاصل ( ازواج حركيه )
محمد يحيى محمد الصيلمي جا 1123-1475 زو
تعاريف
1. اليد الآلية : عادةٌ تتكون اليد الالية من عدد من الأجزاء الصلبة مرتبطه مع بعضها البعض
بمفاصل يمكن أن تكون دورانية أو إنسحابية
2. الوصلة : هي عبارة عن قطعة صلبة تتميز بتوابيتها الديناميكية و الحركية
3. الزروج الحركي : يتألف من وصلتين حركيتين متصلتين فصل و يكون الزوج الحركي معبراً
عن درجة حرية واحدة
4. السلسلة الحركية : تتالف السلسلة الحركية من مجموعة من الوصلات الحركية
5. إحدائيات المفاصل : يتم في المفاصل الدائرية تمثيل إحداثيات المفاصل بزاوية الدوران
© و يرمز لإحدائيات المفاصل ب نو نونجو
6 الإحداثيات الخارجية : تعبير عن وضعية نهاية المؤثرات و اتجهاها بالنسبه لجملة من
زوايا الاتجاهات بالنسبه للجسم لواقع في مجال عمل الروبوت
مثال على ذلك : في عملية تركيب البرغي يتحم تجديد احداثياته و التي تمثل - الطول و
العرض و الارتفاع - بالاضافة الى ذلك إتجاه دوران البرغي ؛ كما في الشكل التالي
محمد يحيى محمد الصيلمي جا 5-315 117 زع
1. اليد الآلية : عادةٌ تتكون اليد الالية من عدد من الأجزاء الصلبة مرتبطه مع بعضها البعض
بمفاصل يمكن أن تكون دورانية أو إنسحابية
2. الوصلة : هي عبارة عن قطعة صلبة تتميز بتوابيتها الديناميكية و الحركية
3. الزروج الحركي : يتألف من وصلتين حركيتين متصلتين فصل و يكون الزوج الحركي معبراً
عن درجة حرية واحدة
4. السلسلة الحركية : تتالف السلسلة الحركية من مجموعة من الوصلات الحركية
5. إحدائيات المفاصل : يتم في المفاصل الدائرية تمثيل إحداثيات المفاصل بزاوية الدوران
© و يرمز لإحدائيات المفاصل ب نو نونجو
6 الإحداثيات الخارجية : تعبير عن وضعية نهاية المؤثرات و اتجهاها بالنسبه لجملة من
زوايا الاتجاهات بالنسبه للجسم لواقع في مجال عمل الروبوت
مثال على ذلك : في عملية تركيب البرغي يتحم تجديد احداثياته و التي تمثل - الطول و
العرض و الارتفاع - بالاضافة الى ذلك إتجاه دوران البرغي ؛ كما في الشكل التالي
محمد يحيى محمد الصيلمي جا 5-315 117 زع
كتابات مشابهة
مقدمة في الشبكات العصبية الاصطناعية
يتناول هذة الكتاب الذكة الاصطناعية
مدخل إلى علم الذكاء الاصطناعي (الصنعي)
ترجمة لملخصات رائعة من موقع http://www.myreaders.info/ تحتوي على الفصول الثلاثة الأهم في الذكاء الاصطناعي: الفصل الاول: مقدمة شاملة للذكاء الاص...
المنطق الضبابي في معالجة الصور
في السنوات الماضية دخلت التقنيات الضبابية مجال الرؤية الحاسوبية ومعالجة الصور بقوة وامست تنافس الطرق الكلاسيكية من حيث الجودة والاداء , ونذكر بال...
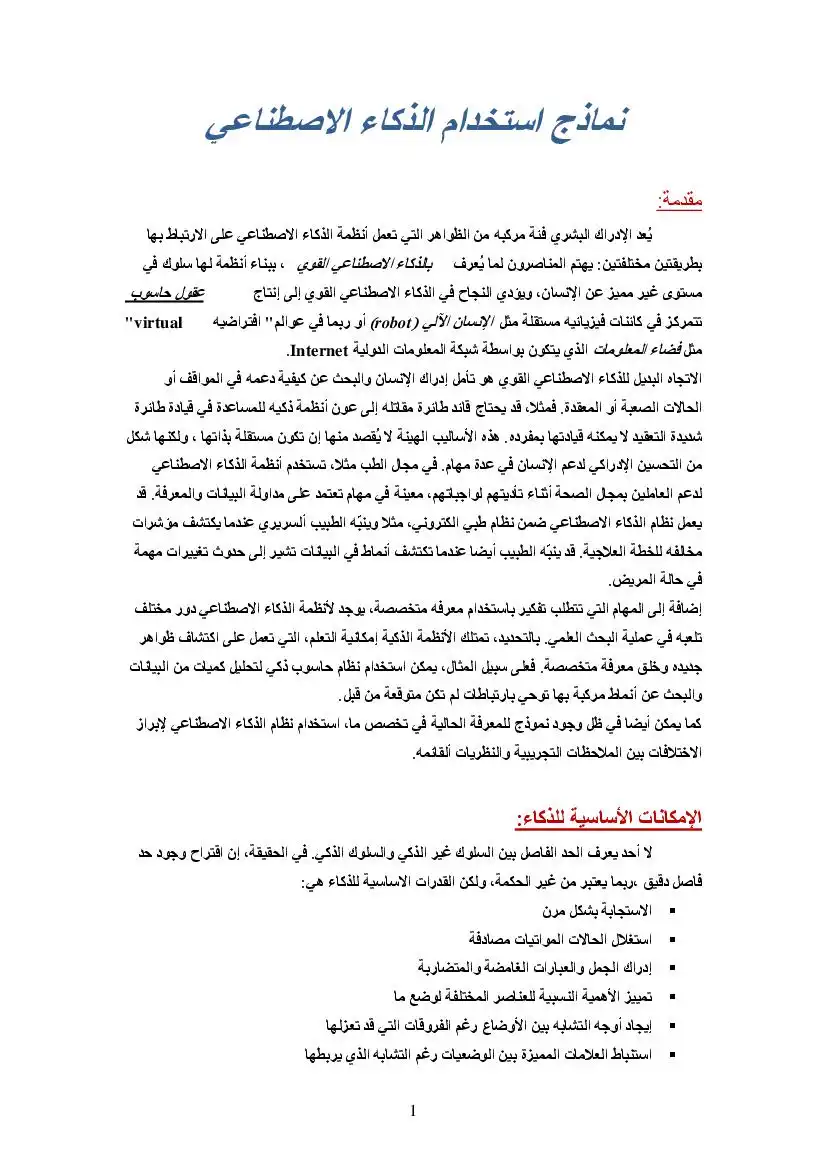
نماذج استخدام الذكاء الاصطناعي
يصف هذا الكتاب استخدامات الذكاء الصناعي في حياتنا العملية والمجالات التي يستفاد من الذكاء الاصطناعي . تأليف:
مدخل إلى علم الذكاء الاصطناعي الصنعي
ترجمة لملخصات رائعة من موقع http://www.myreaders.info/ تحتوي على الفصول الثلاثة الأهم في الذكاء الاصطناعي: الفصل الاول: مقدمة شاملة للذكاء الا...